|
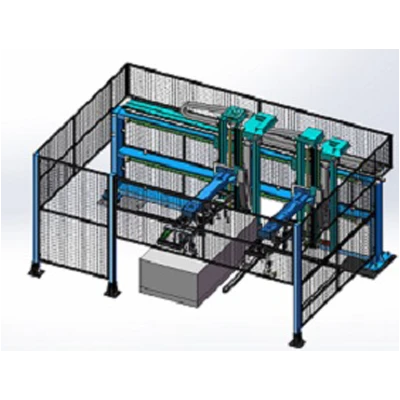
機能と紹介
ガラスを掴んで伝送線に置く。
1.ガラスローディングシステムは、ガラス移動ロボットアームと紙ピッキングロボットアームで構成されています。
2.機械には 2 つのガラス保管ステーションと 1 つの紙保管ステーションが含まれています。
3.ガラス移動ロボットアームがガラスを伝送ラインに置き、同時に紙ピッキングロボットアームが紙を取り除きます。
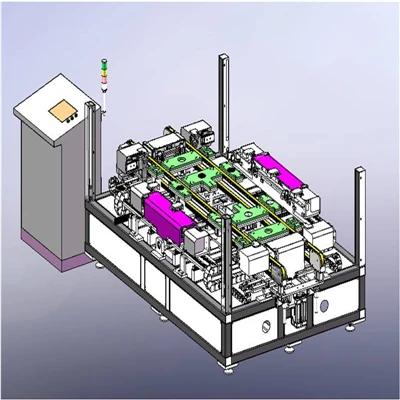
4.サーボモーターで駆動される機械は、吸盤がガラスを指定されたステーションに引き込みます。
5.ガラスローディングロボットアームはカンチレバー構造、紙ピッキングロボットアームはガントリー構造です。
主要パラメータ
モジュール形式: (1580-2000)mm*(800-1000)mm
サイクルタイム:<35s
Max capacity: >2468/日
オペレーターオンライン: なし
定格電力: 8.26kw
圧力: 0.7MPa+0.1
入力電圧:380V
寸法: 4610mmx2780mmx2150mm
アドバンテージ
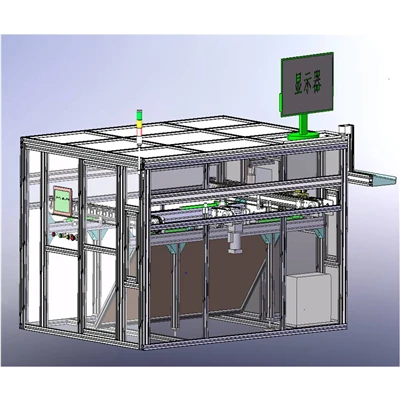
1.機械は溶接フレーム本体、高強度、信頼性、負荷時の堅牢性を備えた鋼構造を使用しています。
2.ガラスキャリアの吸着プレートはポリウレタン製で、ロード中にガラスに印刷されません。
3.サーボモーターは正確で安定した動作をします。
4.機械には、操作の安全性を確保するための安全柵が装備されています。
5.オペレーターによる荷重の不確実性を軽減し、出力を向上させます。
6. 機械は全自動であり、人間の介入を必要としません。
|